


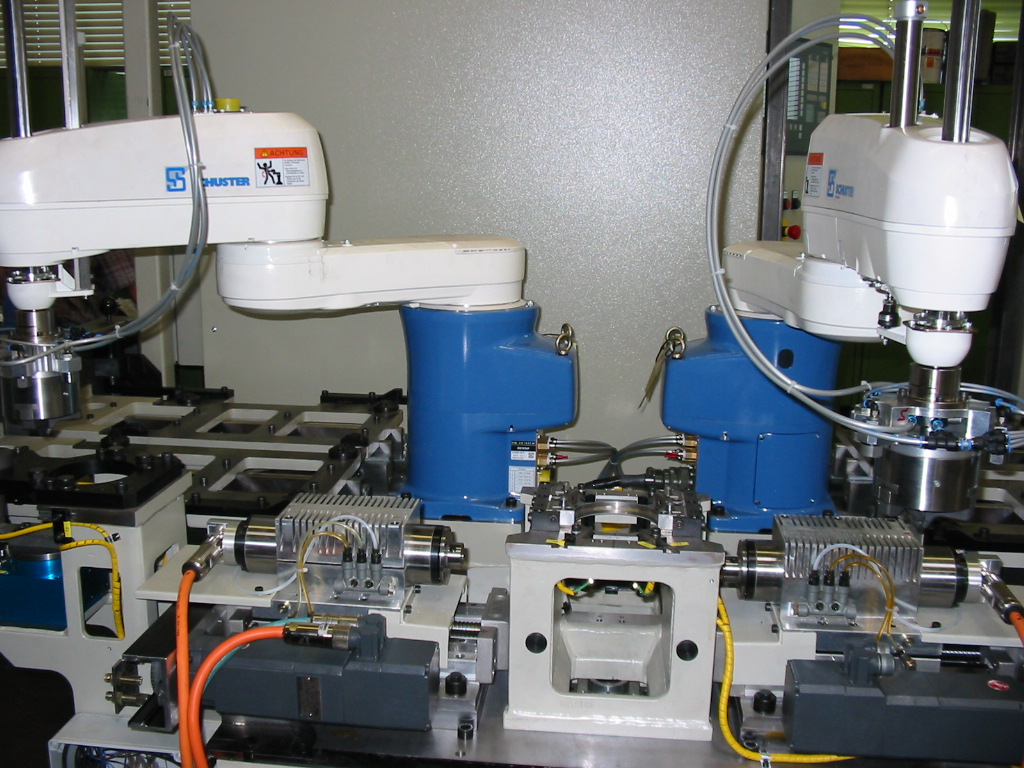
Sonderbohrmaschine
Eine hochproduktive Anlage für Kleinteile zu konstruieren und zu bauen, war
für die Firma Stadler eine weitere Aufgabenstellung. Die ausgeführte
Lösung für diesen Kundenwunsch sehen Sie nebenan.
Über zwei Vibrationsförderer werden die Werkstücke für die
Roboterbeladung in Position gebracht. Zwei Roboter, jeweils mit Spannfutter
ausgerüstet, entnehmen die Teile aus der Entnahmeposition und bringen sie
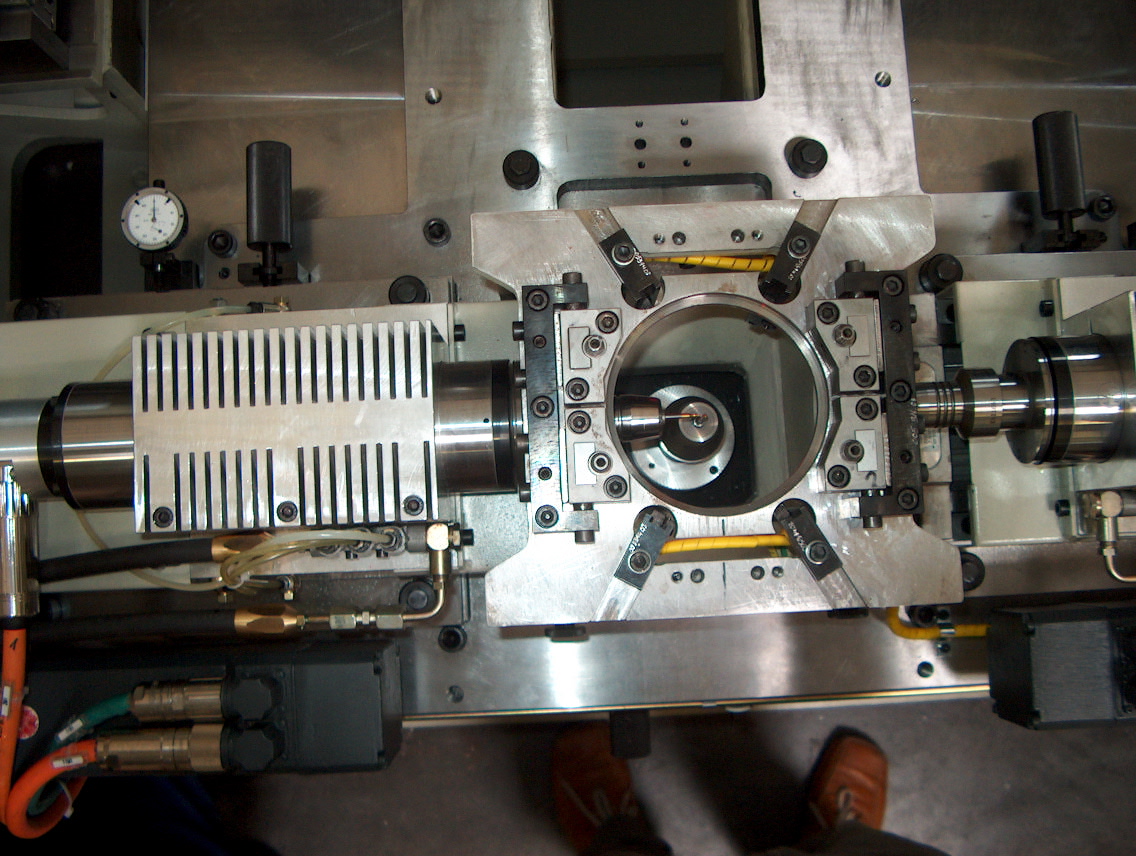
anschließen in die Spann- futterzentrierstation, welche gleichzeitig
Bearbeitungsstation ist. Zwei gegen- überliegende Bohrspindeln bearbeiten
gleichzeitig zwei Düsenbohrungen. Aus Taktzeitgründen findet eine
wechselweise Bearbeitung statt. Anschließend wird mit einer vertikal
angeordneten Bohrspindel der entstandene Innengrat entfernt. Nach dieser
Bearbeitung positioniert der Roboter die Teile auf einer Palette. Die Taktzeit
war 3,0 sek.

 |
 |
 |